About Me
I am currently a M.Eng. candidate for Autonomy & Robotics at University of Illinois Urbana-Champaign (UIUC). Before joining UIUC, I was a Self-driving Car Engineer at Shenzhen Yelink Technology Co., Ltd.
My research interests are in the intersection of autonomous driving, motion planning, and perception, whose goal is to improve the intelligence of autonomous driving by intelligent decision systems and robust perception systems.
Education
-
University of Illinois Urbana-Champaign (UIUC) 2022.08 - 2023.12 (Expected)
-
Candidate for M.Eng. in Autonomy & Robotics Urbana, IL, USA
-
Current Courses: Autonomous Vehicle System Engineering, Deep Learning, Machine Learning
-
-
Northeastern University (NU) 2021.09 - 2022.05
-
Candidate for M.S. in Robotics (CS) & Graduate Global Pathways (language program) Boston, MA, USA
-
Course: Robotics Science & System (Arm Motion Planning, EKF-SLAM, PCI, RANSAC Algorithm, etc.)
-
-
Dongguan University of Technology (DGUT) 2015.09 - 2019.06
-
Candidate for B.Eng. Mechanical Engineering and Automation (with IEET Accreditation) Dongguan, China
-
Related Courses: Robotics and Machine Vision, Linear Algebra, C/C++, Theoretical Mechanics, etc.
-
Professional Experience
-
Self-driving Car Engineer (L4 Self-driving Car), Shenzhen YeLink Technology Co., Ltd. 2020.7 - 2021.9
- Autonomous Braking System for Train: Based on the Euclidean clustering algorithm to identify the people appearing in the tunnel, and then finished the autonomous braking task. (Tested in trains in Shenzhen)
- Perception: Synchronous processing of different Lidar data, fusing and Splicing point cloud data to reduce the perception blind spot of vehicles; Implement Pointpillars algorithms and Yolo3 to detect objects and person.
- Autonomous Driving System Architecture: Deploy the perception, planning, and decision modules of vehicles and Simulation (Gazebo) based on ROS; Develop Android apps and software (based on QT) for testing and interacting the systems.
-
Research Assistant, Guangdong Intelligent Equipment Engineering Research Center 2019.7 - 2020.6
- Fault Diagnosis of Industrial Robots: Used the level-based learning swarm optimizer (LLSO) to optimize the input weights and hidden layer biases of the Extreme Learning Machine (ELM) to further improve the generalization performance of ELM for fault diagnosis of industrial robotic arms with gear failures (with crack, broken tooth, pitting). [Publication]
- Swarm Robotics: Setting up the mapping mechanism between the foraging driving principle of physarum polycephalum (a slime mold) and the swarm robot system to design a bio-inspired distributed search algorithm. The proposed algorithm improved the adaptability of swarm robots in limited communication circumstances and shows more efficiency when compared with other search strategies, including some search strategies trained from the Recurrent Neural Network (RNN). [Publication]
Project
Autopilot on Cyberpunk 2077 Based on Convolutional Neural Network (CNN) 2022.7 - 2022.8

Lane Line Detection: Calculate the straight lines in the image based on Hough transform, and match similar line groups based on slope and intercept, and take the two most common line segments as the lane lines of the vehicle.
Autopilot: Collecting the keyboard control and the frame of image, the AlexNet deep Convolutional Neural Network (CNN) based on TFLearn is trained, so that the vehicle can complete the automatic driving task.
Hybrid-Robotics, Autonomous Tennis Ball Collector 2022.4 - 2022.5
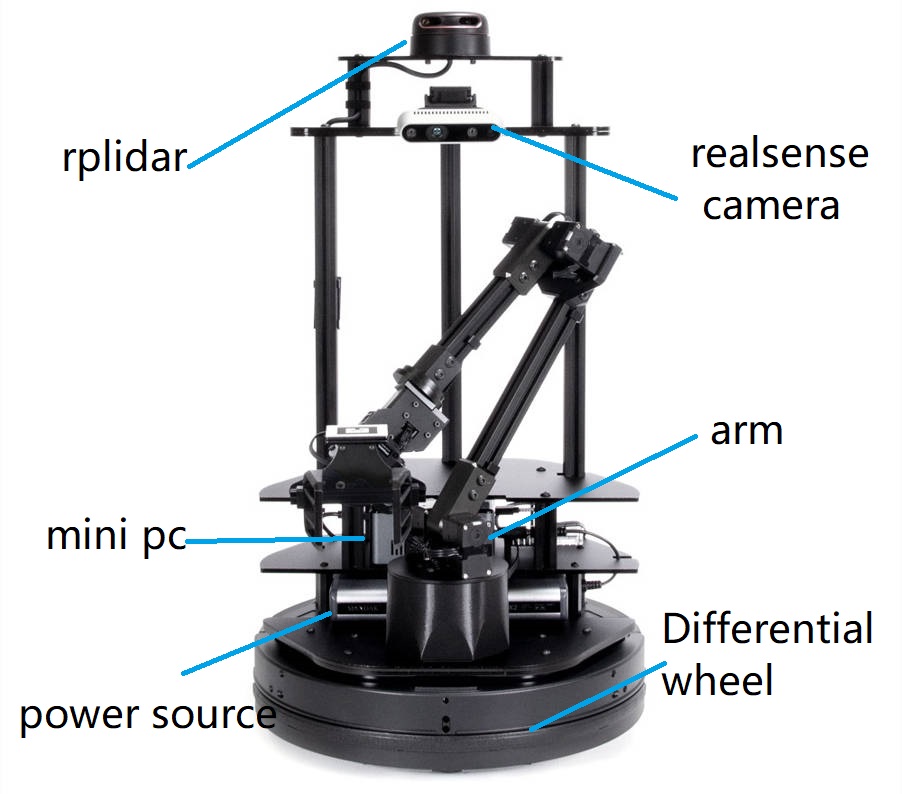
Pick up Function: Training the robot to recognize tennis balls based on Cascade Classifier; Calculating the distance of tennis balls from the camera based on the camera matrix of the Realsense sensor and converting the position to the frame of the arm; Based on MoveIt API to pick up the tennis ball.
SLAM & Navigation: Implement Cartography-SLAM on robot and develop an RRT-autonomous SLAM function; Navigating to where the tennis ball is placed through a dynamic window algorithm (DWA). [Project Link]
Multi-Robot Collaborative Search Based on Recurrent Neural Network (RNN) 2020.2 - 2020.3
End-to-End Learning: By constructing a recurrent neural network (RNN), combined with genetic algorithm (GA) to iteratively train multi-robot system to learn to cooperate with each other and complete the search for targets. Built a fitness function based on the time consumption and the number of times the robot finds target objects.
Input & Output: The input includes: the color signal of the LED lights of the group robot (group communication signal), the signal of the floor color recognition (judging whether to enter the target area), the distance and angle detected by the proximity sensor, and the output: the rotational speed of the differential wheel. [Project Link]
Fault Diagnosis of Industrial Robots by an Extreme Learning Machine 2019.7 - 2020.6

Introduction: Designed an extreme learning machine (ELMs) with a level-based learning swarm optimizer (LLSO-ELM) for fault diagnosis of industrial robotic arms with gear failures, (including crack, broken tooth, pitting).
Implement: Used the LLSO to optimize the input weights and hidden layer biases of the ELMs to further improve the generalization performance of ELMs. Compared the proposed LLSO-ELM with the ELM that verified the higher prediction accuracy of LLSO-ELM. [Publication]
Target Search of Swarm Robot Imitating the Foraging Behavior of Physarum Polycephalum 2019.7 - 2020.6

Purpose: In response to the limited communication in personnel search and rescue after earthquakes, I designed a novel multi-robot cooperative search strategy inspired by the foraging behavior of Phyllodes polycephalus (a slime mold).
Implement: The proposed algorithm improved the adaptability of swarm robots in limited communication circumstances and shows more efficiency when compared with other search strategies, including some search strategies trained from the Recurrent Neural Network (RNN). [Publication]
Funding: 200,000 RMB funded by Guangdong Provincial Department of Education.
Development of Stress Analysis Software for Civil Construction Components 2021.2 - 2021.3
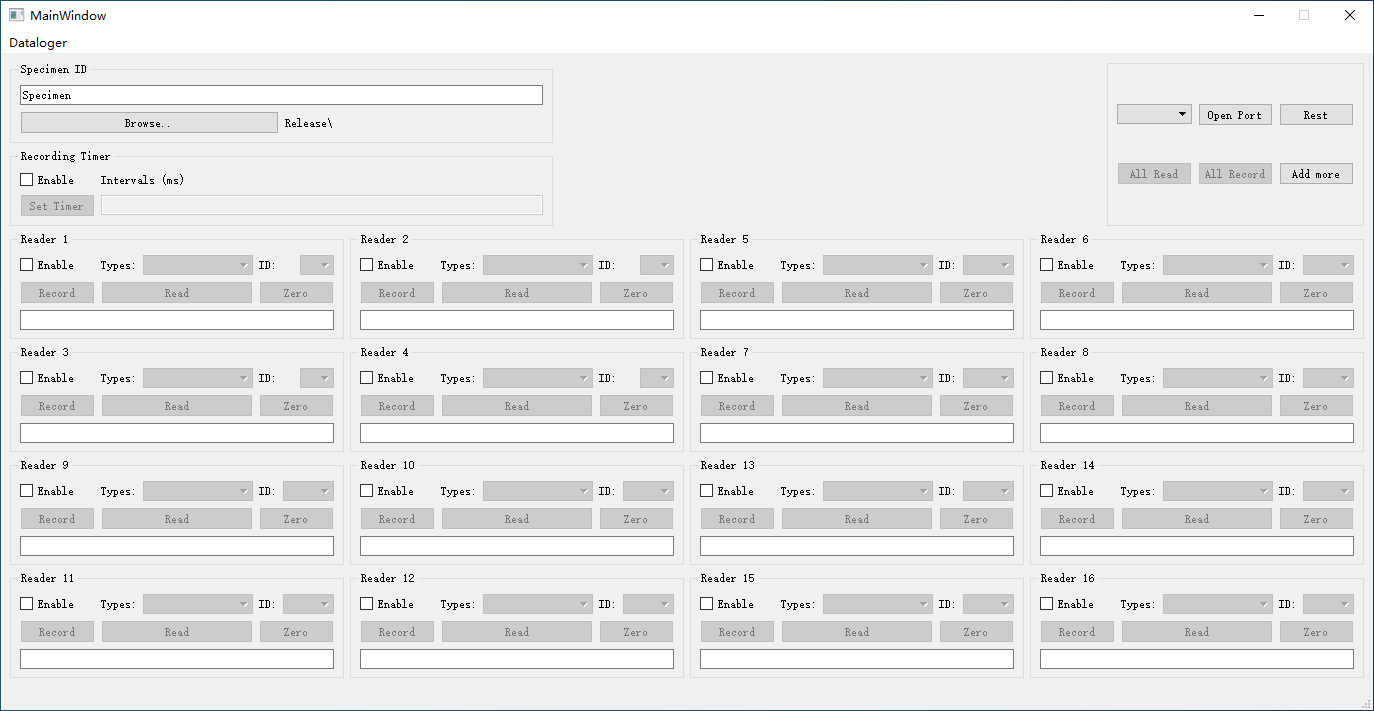
Purpose: Collaborative project with Edinburgh Napier University, UK.
QT Development: Develop a variety of RS485 sensor data acquisition systems, including inclination sensors, torque sensors, displacement sensors; involving multi-threading, slot function, serial port development, file operation, etc. The software can support the simultaneous reading of 16 sensor data, data storage, transmission verification, high-frequency reading and writing and other functions. [Project]
Selected Publication
- Yandong Luo, Jianwen Guo, Zhenpeng Lao, Shaohui Zhang, Xiaohui Yan, “Swarm Robot Exploration Strategy for Path Formation Tasks Inspired by Physarum polycephalum”, Complexity, vol. 2021, Article ID 6698421, 17 pages, 2021. https://doi.org/10.1155/2021/6698421
- Guo, Jianwen, Xiaoyan Li, Zhenpeng Lao, Yandong Luo, Jiapeng Wu, and Shaohui Zhang. “Fault Diagnosis of Industrial Robot Reducer by an Extreme Learning Machine with a Level-Based Learning Swarm Optimizer.” Advances in Mechanical Engineering, (May 2021). https://doi.org/10.1177/16878140211019540.
- Luo, Yandong, Jianwen Guo, Guoliang Ye, Yan Wang, Li Xie, Xiang Wang, Shaohui Zhang, and Xiaohui Yan. “Toward Target Search Approach of Swarm Robotics in Limited Communication Environment Based on Robot Chains with Elimination Mechanism.” International Journal of Advanced Robotic Systems, (May 2020). https://doi.org/10.1177/1729881420919954.
Awards
- Yang Chen-Ning Scholarship (Yang Chen-Ning, Nobel Laureate in Physics in 1957)
- Third prize in the “15th ‘Challenge Cup’ National University Students’ Extracurricular Academic Science and Technology Works Competition” (the highest achievement of school, 457/1229 in China)
- First prize in the “14th ‘Challenge Cup’ Guangdong University Students’ Extracurricular Academic Science and Technology Works Competition” (the highest achievement of school, 117/1123 in Guangdong Province)
- Silver Award of the 4th “Internet+” Innovation and Entrepreneurship Competition for University Students in Guangdong Province (the highest achievement of school, 25/120 in Guangdong Province)
- First Prize in the 6th “WaHaHa” National University Student Entrepreneurship Marketing Practice Competition (the highest achievement of school)
- Third Prize in 15th National Computer-Aided Team & Individual Challenges (2D, CAD) 12/2016
- Third Prize in 15th National Computer-Aided Team & Individual Challenges (3D, SolidWorks) 12/2016
- Special Awards in the 7th “Challenge Cup” College Students Extracurricular Academic Science and Technology Competition, Dongguan University of Technology (Scientific and Technological Inventions Group) 09/2017
- Third Prize in the 7th “Challenge Cup” College Students Extracurricular Academic Science and Technology Competition, Dongguan University of Technology (Academic Papers Group) 09/2017
- “Guangong Star” ——“Team Star”, Dongguan University of Technology 05/2018
- Third-class Scholarship, Dongguan University of Technology 10/2016
- Academic Scholarships, Dongguan University of Technology 10/2017
- Outstanding Students, Dongguan University of Technology 12/2017
- Academic Scholarships, Dongguan University of Technology 10/2018
- Excellent graduates, Dongguan University of Technology 06/2019
Feedback
If you find any problems or have some interest in these projects, please feel free to let me know that: dongdashu.aa@gmail.com
